
























































































































































































































新闻中心
NEWS
自动驾驶车辆配备了众多传感器,如摄像头、激光雷达等。这些传感器各自获取的数据需通过标定来明确相互间的坐标关系,从而将多元传感器数据融合为一个统一的感知体系。准确的传感器标定,是构建智能车辆多传感器感知与定位系统的基石,它直接影响着车辆对周围环境的理解和决策能力
其原理是将已知的标准量输入待标定的传感器,同时获取传感器的输出量。通过对输入量与输出量进行对比分析和处理,生成一系列能表征两者对应关系的标定曲线,进而得出传感器性能指标的实测结果
内参数是传感器自身所固有的特性,它决定了传感器内部的映射关系。以Camera为例,其焦距和镜头畸变属于内参数范畴;对于Lidar,内部激光发射器坐标与激光雷达坐标装置之间的转换关系也为内参数。这些内参数是传感器自身的属性,不随传感器在外部环境中的位置和姿态变化而改变
外参则是指传感器相对位置朝向对于世界坐标系的旋转和平移变换关系。通常用三维的旋转矩阵R3×3(具有3个自由度)和平移向量T3×3(同样具有3个自由度)共6个自由度来表示,以此确定传感器与外部坐标系之间的转换关系。大多数传感器在安装后都需要进行标定,以保障测量的准确性和可靠性
在智能驾驶中,以Camera为例,其涉及到像素坐标系、图像坐标系、相机坐标系和世界坐标系。标定的核心任务之一就是获取这四大坐标系之间的对应关系,即外参矩阵
像素坐标表示的是像素在图像中的位置。一般情况下,像素坐标系的左上角顶点为原点,水平向右为u轴,垂直向下为v轴,单位为pixel
在像素坐标系中,像素坐标的表示方式无法直接反映图像中物体的物理尺寸。因此,需要将像素坐标转换为图像坐标。将像素坐标系的原点平移到图像的中心,即为图像坐标系的原点。图像坐标系的x轴与像素坐标系的u轴平行且方向相同,y轴与像素坐标系的v轴平行且方向相同
相机坐标系以相机的光轴作为Z轴,光线在相机光学系统的中心位置(即透镜的中心)为原点Oc。相机坐标系的水平轴Xc与垂直轴Yc分别与图像坐标系的X轴和Y轴平行。在相机坐标系中,原点Oc与图像坐标系的原点之间的距离OcOi为焦距f
世界坐标系是图像与真实物体之间的映射关系。对于单目视觉,主要是真实物体尺寸与图像尺寸的映射;对于多目视觉,则需要明确多个相机之间的关系,而这种关系需要在同一个坐标系下进行换算。世界坐标系的原点为Ow,其Xw、Yw、Zw轴与其他坐标系并非平行关系,而是存在一定的角度和一定的平移。当对相机坐标系安装特定参数,分别绕着X、Y、Z轴进行平移和旋转后,即可得到在世界坐标系中的坐标。从世界坐标系变换到相机坐标系可用一个旋转矩阵R和一个平移向量T表示,由于世界坐标系到摄像头坐标系的转换关系是摄像头在世界坐标系下的位置姿态矩阵,所以这个R和T被称为相机的外参矩阵
在标定过程中,如果物体与相机的距离不同,那么就必须在不同位置对相机进行标定。这是因为当物体离相机远时,在图像上呈现的尺寸较小,一个像素代表的实际尺寸就大;当物体离相机近时,成像效果较大,一个像素代表的实际物体尺寸就小。因此,为了确保标定的准确性和全面性,对于每一个位置都需要进行标定
由于相机多采用透镜,生成的图像可能会产生一定的形变、扭曲或其他变化,这就是图像畸变。图像畸变主要可分为径向畸变和切向畸变
在自动驾驶汽车的影像摄像头工作中,径向畸变主要有桶形畸变和枕形畸变两种。一般来说,广角镜头容易产生桶形畸变,长焦/变焦镜头则容易出现枕形畸变
切向畸变可理解为当透镜与成像平面不平行时产生的畸变,类似于透视变换
在通常的单目视觉应用中,求得内参和畸变参数后,就能够对新拍摄的图像进行变换和矫正。矫正后的图像可用于后续的各种处理,如目标检测、识别等。对于双目视觉而言,需要结合世界坐标系。在对单目视觉完成内参和畸变参数的矫正后,可利用这些变换后的图像,同时结合世界坐标系实现定位或其他功能
外参标定方法主要分为无目标(targetless)标定和基于目标(target based)标定
无目标标定不需要特殊的目标,而是在自然环境中进行。它利用自然环境中的静止物体,如树木、电线杆、路灯杆、交通标志牌等,以及清晰的车道线进行标定。这种方法的优点是无需额外设置特殊目标,操作相对简便,但准确性可能相对较低
基于目标标定需要一个特殊的控制场,并设置一个真实值(GT)目标,如棋盘、多边形棋盘(张氏标定法)等。通过棋盘格的角点来建立对应关系,从而实现标定。基于目标的方法可以利用有关目标的先验知识,增强标定结果的准确性。例如,景颐光电在相关技术研发中,就充分利用了基于目标标定方法的优势,通过精心设计的视觉融合激光雷达定位板和先进的算法,实现了高精度的传感器标定,为智能驾驶的发展提供了有力支持
内参标定通常采用目标法。常用的摄像头内参标定方法是张氏标定棋盘法。除了棋盘格图案外,还有一种常见的圆网格也可用于标定摄像头内参。而一些激光雷达内参标定方法则是通过框或面墙来执行。例如,在某些智能驾驶场景中,景颐光电采用了先进的内参标定技术,结合高精度的视觉融合激光雷达定位板和专业的算法,实现了对摄像头和激光雷达等传感器内参的精确标定,有效提高了传感器的性能和可靠性
传感器标定技术在智能驾驶领域具有举足轻重的地位。通过准确的标定,能够实现传感器数据的精准融合和处理,为车辆的安全、高效行驶提供坚实保障。随着智能驾驶技术的不断发展,传感器标定技术也将不断创新和完善,为智能交通的未来发展注入新的动力
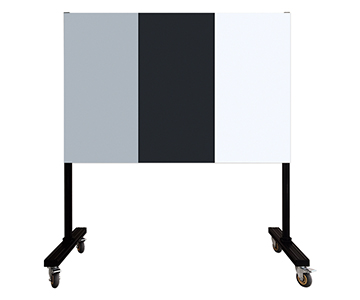
#智能汽车视觉定位板 #视觉融合激光雷达定位板 #视觉雷达融合校准板 #360全景摄像头视觉测试参比板 #灰阶视觉测试参比板 #标定板
产品图片:-
•
场景图片:

